
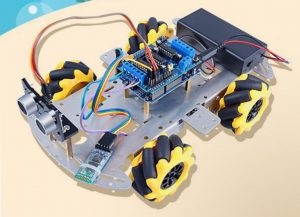
ชุดทดลองหุ่นยนต์รถอัจฉริยะที่ขับเคลื่อนไปได้ 360 องศา แบบ 4WD ด้วยล้อแบบเมคานัม (MecanumWheel) 4 ล้อ ที่สามารถเคลื่อนทีไปได้ในทุกทิศทาง (Omnidirectional movement) สามารถควบคุมผ่านแอพพลิเคชั่นบนโทรศัพท์มือถือด้วยการสื่อสารไร้สายผ่านบลูทูธ ตัวหุ่นยนต์สามารถหลบหลีกสิ่งกีดขวางได้ด้วยเซนเซอร์อัลตราโซนิก โครงสร้างเป็นอะลูมิเนียมอัลลอยแข็งแรง ทนทาน สวยงาม ในชุดประกอบด้วย 4 โมดูลหลัก คือ โมดูลควบคุมหลัก (Arduino UNO R3), โมดูลขับมอเตอร์ (L293D), โมดูลบลูทูธ (HC-05), และโมดูลเซนเซอร์อัลตราโซนิกส์ (HC-SR04) ใช้แบตเตอรี่ลิเทียม 18650 จำนวน 2 ก้อน มาพร้อมบทเรียนและตัวอย่างโปรแกรมการเขียนโปรแกรมควบคุมหุ่นยนต์

แสดงอุปกรณ์ต่างๆ ชุดทดลองหุ่นยนต์รถอัจฉริยะ STEM เมคานัม 4WD
รายการอุปกรณ์ในชุดการทดลอง
|
รายการอุปกรณ์ |
จำนวน | รายการอุปกรณ์ |
จำนวน |
||
|
1. |
CH340G UNO R3 development board | 1 |
8. |
Mecanum wheel single-layer aluminum alloy car chassis | 1 |
|
2. |
L293D driver board | 1 |
9. |
Mecanum wheel single-layer aluminum alloy car CD | 1 |
|
3. |
HC-SR04 Ultrasonic Module | 1 |
10. |
Yellow box (270*165*50mm) | 1 |
|
4. |
HC-05 Bluetooth module | 1 |
11. |
20cm female to female Dupont wire | 16 |
|
5. |
Ultrasonic bracket | 1 |
12. |
M3*8 screw |
10 |
|
6. |
18650 battery box | 1 |
13. |
M3 nut | 2 |
|
7. |
M3*15 double pass copper pillar | 2 |
เนื้อหาการเรียนรู้ในชุดทดลอง
- การติดตั้งโปรแกรม (Installing Arduino IDE) สำหรับพัฒนาตัวหุ่นยนต์ โดยในชุดทดลองจะมาพร้อมตัวอย่างโปรแกรมเบื้องต้น สำหรับให้ผู้เรียนเป็นแนวทางในการเรียนรู้และสามารถขึ้นได้ใหม่ด้วยตัวเอง
- การติดตั้งโปรแกรมเสริม (Add Librarie) ให้กับโปรแกรม Arduino IDE ในส่วนโปรแกรมเสริมต่างๆ นี้ จะถูกพัฒนาขึ้นมาเพื่อช่วยลดขั้นตอนการเขียนโปรแกรมการทำงานหลักให้น้อยลงและช่วยให้เรียนรู้เนื้อการเขียนโปรแกรมนั้นๆ ได้รวดเร็วยิ่งขึ้น
- การใช้งานเซนเซอร์อัลตร้าโซนิกส์ (Ultrasonic transducer) ในส่วนของเนื้อหาเกี่ยวกับเซนเซอร์อัลตร้าโซนิกส์ จะเป็นส่วนหนึ่งที่สำคัญของตัวหุ่นยนต์สำหรับการเคลื่อนที่โดยไม่ชนสิ่งกีดขวางด้านหน้า ซึ่งมีรายละเอียดของการใช้งานในส่วนของ การเขียนโปรแกรมควบคุมและหลักการทำงานของตัวเซนเซอร์
- ขั้นตอนการประกอบตัวหุ่นยนต์ (Car assembly) การประกอบตัวหุ่นยนต์จะเป็นแนวทางให้ผู้เรียนสามารถประกอบได้ด้วยตัวเองให้สำเร็จ โดยจะมีขั้นตอนของการประกอบมอเตอร์และตัวล้อ, การประกอบบอร์ดควบคุมและตัวบอร์ดเสริมขับมอเตอร์ (stack L293D board) รวมถึงโมดูลเซนเซอร์อัลตร้าโซนิกส์และแบตเตอรี่จ่ายไฟเลี้ยงตัวหุ้นยนต์
- การเชื่อมต่อสายไฟให้กับหุ่นยนต์ (Wiring part) เป็นการเชื่อมต่อสายไฟระหว่างบอร์ดต่างๆ เข้าด้วยกัน ซึ่งจะมีรายละเอียดที่เกี่ยวข้องกับสายไฟเลี้ยงและสายสัญญาณให้บอร์ดต่างๆ, การต่อเชื่อมต่อสายไฟของมอเตอร์มายังบอร์ดขับ และมีโปรแกรมตรวจสอบการต่อสายไฟเพื่อสังเกตการทำงานเบื้องต้นอีกด้วย
- การวิเคราะห์โปรแกรมและใช้งานแอพลิเคชั่น (Program analysis) จะเกี่ยวข้องกับโปรแกรม Arduino IDE ในการตรวจสอบการคำสั่งต่างๆ ให้ถูกต้องตามที่กำหนด และแนะนำการเชื่อมต่อโมดูลบูลทูธในตัวหุ่นยนต์กับโทรศัพท์มือถือและการใช้งานคำสั่งในแอพพลิเคชั้นสำหรับควบคุมตัวหุ่นยนต์ให้เคลื่อนที่
- การวิเคราะห์โปรแกรมควบคุมหุ่นยนต์ (Code analysis) เป็นการอธิบายคำสั่งของโปรแกรม Arduino IDE ของตัวหุ่นยนต์ ซึ่งจะแบ่งอธิบายเป็นส่วนๆ ให้เข้าใจได้ง่ายขึ้น เช่น การกำหนดค่าตัวแปรต่างๆ และพอร์ตสื่อสาร, การสื่อสารกับไอซีเบอร์ 74HTC595N, การรับคำสั่งควบคุมจากโมดูลบูลทูธและการปรับความเร็วของการเคลื่อนที่ให้กับตัวหุ่นยนต์ เป็นต้น
ลักษณะของหุ่นยนต์รถอัจฉริยะ STEM เมคานัม 4WD ที่ประกอบเสร็จสมบูรณ์
ตัวอย่างเนื้อหาของชุดฝึกการเรียนรู้
1. การกล่าวนำเนื้อหาและความรู็เกี่ยวอุปรณ์ใช้งาน : การกล่าวนำก่อนเข้าบทเรียนและเกี่ยวกับอุปกรณ์ตัวเซนเซอร์ หลัการทำงานที่เกี่ยวข้อง การนำไปต่อกับวงจร และหรือการคำนวณบางส่วนเพื่อให้เข้าใจการทำงานของตัวอุปรณ์นั้นๆ ตัวอย่างที่แสดงข้างล่างจะเป็นเซนเซอร์อัลตร้าโซนิกส์สำหรับวัดระยะทาง

2. การเขียนโปรแกรมควบคุม : ขั้นตอนถัดมาจะเป็นการเขียนโปรแกรมควบคุมการทำงานให้กับเซนเซอร์อัลตร้าโซนิกส์ โดยจะนำความรู้ที่ได้จากเนื้อหาของการกล่าวนำต่างๆ มาเขียนเป็นคำสั่งในโปรแกรม Arduino IDE และอาจจะปรับแต่งโปรแกรมบ้างเล้กน้อยเพื่อให้ผลการทดลองได้ค่าตามที่เป็นจริง
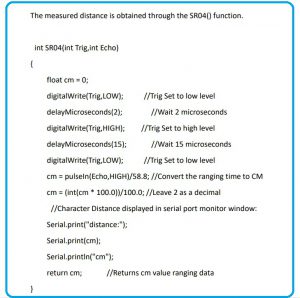
แสดงตัวอย่างโปรแกรมสำหรับการทดลองหุ่นยนต์
3. ผลการทดลองที่ได้ : ขั้นตอนสุดท้ายการทดลองเพื่อสังเกตผลที่ได้รวมทั้งสรุปการทดลอง โดยจะมีทั้งในส่วนของการดูการทดลองที่แสดงผลบนจอคอมพิวเตอร์ และการทดลองจริงกับตัวหุ่นยนต์
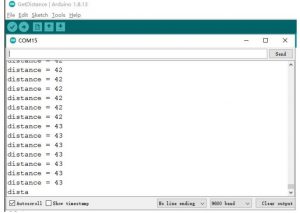
การแสดงผลการทดลองผ่าน Serial monitor ในคอมพิวเตอร์
สำหรับชุดทดลองหุ่นยนต์รถอัจฉริยะ STEM เมคานัม 4WD เหมาะสมกับผู้เรียนระดับมัธยมศึกษาและอาชีวศึกษา ซึ่งผู้เรียนสามารถเรียนรู้ในเรื่องของการเขียนโปรแกรมคอมพิวเตอร์เบื้องต้น, การทำงานของระบบควบคุมคอมพิวเตอร์, การทำงานของระบบกลไกลและแมคคานิกส์ รวมทั้งการฝึกทักษะของการใช้เครื่องมือและการประกอบตัวหุ่นยนต์ ซึ่งในชุดทดลองจะมีเอกสารคู่มือการใช้งานรวมทั้งไฟล์ตัวอย่างโปรแกรมให้ผู้เรียนสามารถพัฒนาเพิ่มเติมตามที่ต้องการ และชุดลองหุ่นยนต์รถอัจฉริยะนี้จะเป็นพื้นฐานของการเรียนรู้ในระดับที่สูงขึ้น
Video youtube by : https://www.youtube.com/watch?v=DVC9tdR-nFk
.
ติดต่อสอบถามข้อมูลเพิ่มเติมได้ที่
บริษัท ซีเอ็ดยูเคชั่น จำกัด (มหาชน) 1858/87-90 ถนนเทพรัตน แขวงบางนาใต้ เขตบางนา กรุงเทพมหานคร 10260
โทรศัพท์ 0 2826 8263 โทรสาร 0 2826 8356-59 อีเมล์ stem@se-ed.com
.