แปลและเรียบเรียง : ณัฐพนธ์ จงฤกษ์มงคล
หุ่นยนต์ LAFVIN Smart Robot Tank Kit เป็นชุดทดลองการเรียนรู้หุ่นยนต์ขนาดเล็ก สำหรับเรียนรู้การเขียนโปรแกรมคอมพิวเตอร์เบื้องต้นผ่านบอร์ดประมวลผล Arduino UNO ซึ่งเป็นที่นิยมใช้งาน รวมทั้งการเรียนรู้กับตัวชิ้นส่วนและอุปกรณ์ต่างๆ สำหรับตัวหุ่นยนต์ ซึ่งผู้เรียนสามารถควบคุมการทำงานของตัวหุ่นผ่านแอพพลิเคชั่นบนโทรศัพท์มือถือแบบสมาร์ทโฟน โดยตัวหุ่นยนต์จะมาพร้อมคู่มือการใช้งาน เอกสารปฏิบัติการทดลอง โปรแกรมการใช้งานร่วมกับหุ่นยนต์ต่างๆ เช่น โปรแกรมแอพพลิเคชั่นสำหรับโทรศัพท์มือถือ โปรแกรมติดตั้งบนคอมพิวเตอร์สำหรับพัฒนาตัวหุ่นยนต์ ตัวอย่างโปรแกรมประกอบการทดลอง รวมถึงสำหรับเขียนโปรแกรมแบบบล็อกและแบบตัวหนังในด้วยภาษาซี ในรูปแบบการทดลองที่ซับซ้อนเพิ่มขึ้น

คุณสมบัติการทำงานของตัวหุ่นยนต์
- ใช้บอร์ดประมวลผล : Arduino UNO
- โปรแกรมพัฒนา : ภาษาสแครช (Scratch), ภาษาซี (C++)
- การโปรแกรมคำสั่งลงบอร์ด : ผ่านพอร์ต USB Port
- การควบคุมหุ่นยนต์ : รีโมทอินฟราเรด, แอพลิเคชั่นบนโทรศัพท์มือถือ
- การขับเคลื่อน : มอเตอร์กระแสตรงและล้อแบบสายพาน
- อุปกรณ์อินพุต : โมดูลบลูธูท, โมดูลอินฟราเรด, โมดูลอัลตร้าโซนิกส์
- อุปกรณ์เอาต์พุต : เซอร์โวมอเตอร์, มอเตอร์กระแสตรง
- ข้อมูลและเอกสารในชุด : คู่มือการประกอบและการใช้งาน, คู่มือปฏิบัติการทดลอง, CD-ROM
อุปกรณ์ต่างๆ ในชุดประกอบหุ่นยนต์ LAFVIN Smart Robot Tank
ในส่วนของอุปกรณ์ชุดประกอบหุ่นยนต์นั้น จะบรรจุอยู่ในกล่องซึ่งประกอบด้วย บอร์ดประมวลผล Arduino UNO, บอร์ดชีลด์เชื่อมต่อกับบอร์ดประมวลผล, ชุดตัวถังประกอบหุ่นยนต์, เซนเซอร์อินฟราเรด, โมดูลทูธรับสัญญาณควบคุม, เซอร์โซมอเตอร์, โมดูลอัลตราโซนิกส์, โมดูลอินฟราเรด, มอเตอร์กระแสตรงขับตัวหุ่นยนต์, แผ่น CD ข้อมูลต่างๆ สำหรับการทดลองหุ่นยนต์, สายดาวน์โหลดโปรแกรมแบบ UBS และชุดไขควงและประแจหกเหลี่ยมสำหรับประกอบตัวหุ่นยนต์

กล่องและอุปกรณ์ภายใน LAFVIN Smart Robot Tank

ลักษณะของอุปกรณ์สำหรับ LAFVIN Smart Robot Tank
โครงสร้างของบอร์ดควบคุมและอุปกรณ์เซนเซอร์ตัวหุ่นยนต์
สำหรับส่วนของการขับมอเตอร์ให้กับตัวหุ่นยนต์ การรับสัญญาณจากตัวเซนเซอร์อินพุตต่างๆ จะต่อเข้ามาที่บอร์ดซีลด์ (Shield) ซึ่งออกแบบใหม่ เพื่อมาต่อเร่วมใช้งานกับตัวหุ่นยนต์ LAFVIN Smart Robot Tank และตัวบอร์ดประมวลผล Arduino UNO โดยตำแหน่งจุดเชื่อมต่อต่างๆ จะถูกแบ่งกลุ่มเพื่อให้ต่อใช้งานได้ง่าย และป้องกันการต่ออุปกรณ์ต่างๆ ผิดพลาดในส่วนหนึ่ง
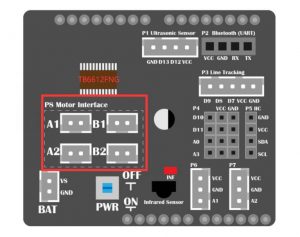
บอร์ดซีลด์ (Shield) สำหรับประกอบร่วมกับบอร์ดประมวลผล Arduino UNO
องค์ประกอบของอุปกรณ์เชื่อมต่อสำหรับตัวหุ่นยนต์ LAFVIN Smart Robot Tank (แสดงในรูปข้างล่าง) เพื่อให้เข้าใจได้ง่ายสำหรับประกอบส่วนต่างๆ เข้าด้วยกัน ซึ่งการเชื่อมต่อระหว่างอุปกรณ์ต่างๆ จะเป็นลักษณะของสายไฟที่ระบุตำแหน่งไว้ตามที่กำหนด (มีเอกสารและคู่มือในการประกอบ) และการเชื่อมต่อแบบเสียบลงคอนเน็กเตอร์ขนาดพอดี
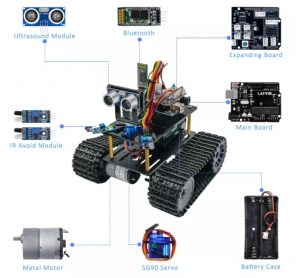
องค์ประกอบของอุปกรณ์เชื่อมต่อสำหรับตัวหุ่นยนต์ LAFVIN Smart Robot Tank
การควบคุมตัวหุ่นยนต์ LAFVIN Smart Robot Tank
ในการควบคุมตัวหุ่นยนต์ LAFVIN Smart Robot Tank Kit นั้นผู้เรียนสามารถควบคุมได้ 2 แบบ คือ แบบที่ 1 เป็นการควบคุมผ่านรีโมทอินฟราเรดขนาดเล็กที่มาพร้อมในชุดทดลอง โดยควบคุมการเดินหน้า ถอยหลัง ไปด้านซ้านและขวาได้ง่าย ซึ่งตัวหุ่นยนต์จะมีตัวรับสัญญาณรีโมทด้านหลังและส่งสัญญาณนั้นไปยังประมวลผล แบบที่ 2 เป็นการควบคุมด้วยโทรศัพท์มือถือโดยการติดตั้งแอพลิเคชั่น ซึ่งสามารถดาวน์โหลดได้บนอินเตอร์เน็ต (Play store) หรือด้วยการติดตั้งโปรแกมแอพลิเคชั่นที่มาพร้อมกับซีดี (CD-ROM) ในชุดทดลองได้เช่นกัน

ลักษณะของการควบคุมหุ่นยนต์ด้วยโทรศัพท์มือถือ

การควบคุมผ่านรีโมทอินฟราเรดขนาดเล็ก
การประกอบบอร์ดควบคุมหุ่นยนต์ LAFVIN Smart Robot Tank
การประกอบส่วนของบอร์ดควบคุม (Arduino UNO) และขับตัวมอเตอร์จะเป็นแบบชีลด์ ซึ่งสามารถถอดและประกอบเข้ากันได้ง่าย โดยเมื่อประกอบเข้าด้วยกันแล้วจะเป็นลักษณะของโมดูลนำไปยึดกับตัวถังหุ่นยนต์ได้ทันที จากนั้นเราสามารถทำการเชื่อมต่ออุปกรณ์ต่างๆ ร่วมกับชีลด์ที่ตำแหน่งคอนเน็กเตอร์ต่างไ เช่น มอเตอร์ โมดูลบลูธูท โมดูลอินฟราเรด เซอร์โวมอเตอร์ โมดูลอัลตร้าโซนิกส์ และแบตเตอรี่ เป็นต้น

การเขียนโปรแกรมทดลองสำหรับ LAFVIN Smart Robot Tank
สำหรับการเขียนโปรแกรมเพื่อควบคุมการทำงานของตัวหุ่นยนต์นั้นจะมีด้วยกัน 2 แบบคือ แบบแรกจะเป็นลักษณะของบล็อกหรือเรียกโปรแกรมสแครช (Scratch) ซึ่งจะเหมาะสำหรับการเรียนรู้เขียนโปรแกรมคอมพิวเตอร์เบื้องต้น และเหมาะสำหรับการเรียนรู้ในระดับประถมจนถึงมัธยมศึกษาตอนต้น ซึ่งตัวโปรแกรมจะมีรูปภาพในบล็อกประกอบการเขียนโปรแกรมเพื่อให้เข้าใจการเขียนโปรแกรมได้ง่ายยิ่งขึ้น ในส่วนของการเขียนโปรแกรมแบบที่ 2 จะเป็นภาษาซี (C++) ในรูปแบบของ Arduino IDE ซึ่งสามารถดาวน์โหลดได้บนอินเตอร์เน็ตและเป็นโปรแกรมใช้งานได้ฟรี (Open Source) โดยเราสามารถศึกษาได้โปรแกรมและตัวอย่างการใช้งานต่างๆ ได้มากมายในอินเตอร์เน็ต.

ลักษณะของโปรแกรมสแครช (ด้านซ้าย) และโปรแกรมภาษาซี (ด้านขวา)

รูปแสดงโปรแกรม Arduino IDE ที่สามารถดาว์นโหลดและใช้งานได้ฟรี

รูปแสดงตัวอย่างของการเขียนโปรแกรมแบบสแครช
ข้อมูลที่เกี่ยวข้องเพิ่มเติมสำหรับหุ่นยนต์ LAFVIN Smart Robot Tank

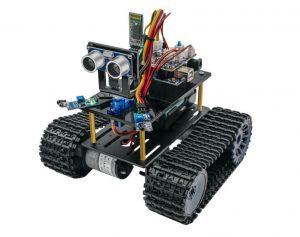
ตัวหุ่นยนต์ LAFVIN Smart Robot Tank Kit ประกอบเสร็จสมบูรณ์
สำหรับโดยภาพรวมของตัวหุ่นยนต์ LAFVIN Smart Robot Tank มีความแข็งแรงและคงทนต่อการนำไปใช้ในการทดลองหรือสำหรับนำไปเล่นเพื่อความสนุกสนานต่างๆ รวมทั้งผู้ใช้สามารถประกอบขึ้นเองได้ง่ายรวมทั้งการควบคุมการงานตัวหุ่นยนต์ ซึ่งจะมีเอกสารควบคู่แนะนำการใช้งานและการเรียนรู้ ทั้งในส่วนของการเขียนโปรแกรมในระดับเบื้องต้นและระดับกลาง การเรียนรู้อุปกรณ์ของตัวหุ่นยนต์ ในส่วนฟังก์ชั่นการใช้งานและรูปแบบของการทำงานของอุปกรณ์ในแต่ละส่วน ซึ่งจะช่วยเป็นพื้นฐานให้ผู้เรียนเข้าใจการทำงานของตัวหุ่นยนต์ รวมทั้งสร้างแรงบรรดาลใจให้กับผู้เรียนเพื่อศึกษาและเรียนรู้ในระดับที่สูงขึ้น
ข้อมูลเพิ่มเติม : .
ติดต่อสอบถามข้อมูลเพิ่มเติมได้ที่
บริษัท ซีเอ็ดยูเคชั่น จำกัด (มหาชน) 1858/87-90 ถนนเทพรัตน แขวงบางนาใต้ เขตบางนา กรุงเทพมหานคร 10260
โทรศัพท์ 0 2826 8263 โทรสาร 0 2826 8356-59 อีเมล์ stem@se-ed.com
.