
หุ่นยนต์ Robobloq Qoopers เป็นหุ่นยนต์สำหรับการเรียนรู้เขียนโปรแกรมคอมพิวเตอร์เบื้องต้น การเรียนรู้เกี่ยวกับอุปกรณ์กลไกต่างๆ และการฝึกทักษะในเพื่อใช้เครื่องมือรวมถึงการประกอบตัวหุ่นยนต์ โดยสามารถปรับเปลี่ยนตัวหุ่นยนต์ได้ 6 รูปแบบ คือ หุ่นยนต์กัปตัน (Captain), หุ่นยนต์แมงป่อง (Scorpion), หุ่นยนต์นักเดินทาง (Voyager), หุ่นยนต์ผู้คุ้มครอง (Guardian), หุ่นยนต์รถตักดิน (Dozer) และหุ่นยนต์นักรบ (Cavalier) ซึ่งสามารถเรียนรู้ได้อย่างสนุกสนาน และรอบรับการเรียนรู้ได้หลายระดับสำหรับผู้เรียน โดยผู้เรียนสามารถประกอบตัวหุ่นยนต์ได้ง่ายและใช้เวลาในการประกอบประมาณ 1 ชั่วโมง และมีสื่อนำแนะนำการประกอบอย่างเป็นขั้นตอนในรูปแบบ 3 มิติ
ตัวหุ่นยนต์ Robobloq Qoopers สามารถควบคุมการทำงานผ่านโทรศัพท์มือถือและคอมพิวเตอร์ทั่วไป (PC) โดยผู้เรียนสามารถเรียนเขียนโปรแกรมควบคุมตัวหุ่นยนต์ได้ตั้งแต่ระดับพื้นฐานด้วยภาษาสแครตช์ (Scratch) ในรูปแบบกราฟิก จนถึงในระดับที่สูงขึ้นด้วยการเขียนโปรแกรมแบบตัวหนังสือ (Text Mode) กับภาษา C++ (Platform Arduino) และไพทอน (Python) ทั้งนี้ตัวหุ่นยนต์ Robobloq Qoopers จะเหมาะสมอย่างยิ่งสำหรับการเรียนรู้สำหรับเด็กๆ
คุณสมบัติของตัวหุ่นยนต์ Robobloq Qoopers
- ตัวหุ่นยนต์รุ่น : Qoopers
- บอร์ดประมวลผล : Arduino Mega2560
- มอเตอร์ขับแบบมีเอนโค้ดเดอร์รุ่น : 520 DC Motor
- การเชื่อมต่อสื่อสาร : บูลทูธ 4.0+
- ส่วนขยายพอร์ต : เชื่อมต่อเซนเซอร์ 6 ช่อง และมอเตอร์ 2 ตัว
- อุปกรณ์อินพุต : สวิตช์กด และโมดูลอัลตราโซนิก
- อุปกรณ์เอาต์พุต : บัซเซอร์, แอลอีดีแสดงผล, เมตริกซ์แอลอีดี 14×10 ดวง
- แบตเตอรี่ : ใช้ขนาด AA จำนวน 6 ก้อน
- โปรแกรมพัฒนา : Robobloq APP, MyQode และ Arduino IDE
- น้ำหนักตัวหุ่นยนต์ : 1900 กรัม
อุปกรณ์ต่างๆ สำหรับตัวหุ่นยนต์ Robobloq Qoopers
สำหรับอุปกรณ์ในชุดหุ่นยนต์ Robobloq Qoopers จะมีให้ครบถ้วน ซึ่งจะประกอบด้วยอุปกรณสำหรับหุ่นยนต์, เครื่องมือสำหรับประกอบตัวหุ่นยนต์, รวมทั้งแผ่น CD สำหรับข้อมูลใช้ในการเขียนโปรแกรมและเอกสารประกอบการทดลองต่างๆ

อุปกรณ์ต่างๆ ในกลุ่มที่ 1 ของตัวหุ่นยนต์ Robobloq Qoopers ในรูปข้างบนจะประกอบด้วย
- สายพานขับเคลื่อน จำนวน 2 เส้น
- แพ็กแบตเตอรี่ Li-ion จำนวน 1 กล่อง
- ล้อยางแบบกลม จำนวน 2 วง
- ขอบล้อวงกลมหน้า จำนวน 2 วง
- ขอบล้อวงกลมหลัง จำนวน 2 วง
- ชุดแผ่นเพลตประกอบเพิ่ม จำนวน 7 ชุด
- ชุดแฟรมหุ่นยนต์ จำนวน 8 ชุด
- แฟรมต่อ 2 รู จำนวน 1 ตัว
- แฟรมต่อ 10 รู จำนวน 2 ตัว
- แฟรมต่อ 6 รู จำนวน 2 ตัว
- พลาสติกรับแกนนอต 4mm จำนวน 2 ตัว
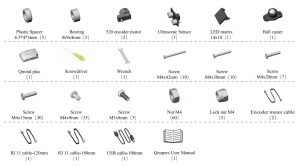
อุปกรณ์ต่างๆ ในกลุ่มที่ 2 ของตัวหุ่นยนต์ Robobloq Qoopers ในรูปข้างบนจะประกอบด้วย
- พลาสติกรับแกนนอต 3mm จำนวน 5 ตัว
- แบริ่งรับแกนนอต 4mm จำนวน 5 ตัว
- มอเตอร์เอนโค้ดเดอร์ รุ่น 520 จำนวน 2 ตัว
- เซนเซอร์อัลตราโซนิก จำนวน 1 ตัว
- จอแสดงผลแอลอีดีแบบเมตริกซ์ 14X10 ตัว
- ล้อประคองหุ่นยนต์ จำนวน 1 ตัว
- กล่องควบคุมหุ่นยนต์ (Qmind plus) จำนวน 1 กล่อง
- ไขควงสำหรับประกอบ จำนวน 1 ด้าม
- ประแจสำหรับประกอบ จำนวน 1 ด้าม
- สกรูขนาด M4x42mm จำนวน 10 ตัว
- สกรูขนาด M4x30mm จำนวน 30 ตัว
- สกรูขนาด M4x20mm จำนวน 7 ตัว
- สกรูขนาด M4x15mm จำนวน 30 ตัว
- สกรูขนาด M4xmm จำนวน 32 ตัว
- สกรูขนาด M3x8mm จำนวน 5 ตัว
- นอตสำหรับสกรูขนาด M4 จำนวน 60 ตัว
- นอตสำหรับสกรูขนาด M4 (แบบล็อก) จำนวน 5 ตัว
- สายไฟเชื่อมต่อมอเตอร์ (แบบเอนโค้ดเดอร์) จำนวน 2 เส้น
- สายไฟเชื่อมต่อ RJ11 ขนาด 120mm จำนวน 1 เส้น
- สายไฟเชื่อมต่อ RJ11 ขนาด 180mm จำนวน 1 เส้น
- สายไฟเชื่อมต่อพอร์ต UBS ขนาด 100mm จำนวน 1 เส้น
- คู่มือการใช้งานหุ่นยนต์ จำนวน 1 เล่ม
การควบคุมตัวหุ่นยนต์ Robobloq Qoopers ผ่านโทรศัพท์มือถือ
สำหรับการควบคุมตัวหุ่นยนต์ Qoopers นั้น จะมีให้เลือกได้ 6 รูปแบบตามที่เราได้ประกอบตัวหุ่นยนต์ขึ้น โดยตัวหุ่นยนต์แต่ละแบบในแอพพลิเคชันบนโทรศัพท์มือถือนั้น สามารถเลือกฟังก์ชันต่างๆ เพิ่มเติมใด้อีกด้วย เช่น โหมดการควบคุมตัวหุ่นยนต์, โหมดการหลบหลีกสิ่งกีดขวาง, โหมดแสดงผลเมตริกซ์, โหมดเขียนโปรแกรม ทั้งนี้จะช่วยให้ผู้เรียนมีความสนุกสนานในการเรียนรู้ได้หลายรูปแบบ (ก่อนการใช้งานแอพพลิเคชันเราต้องเปิดการเชื่อมต่อด้วยบลูทูธ และการแสดงตำแหน่งที่ตั้ง (Location GPS) ในตัวแอพพลิเคชันในโทรศัพท์มือถือก่อน)

แสดงลักษณะของหุ่นยนต์ Qoopers ในรูปแบบต่างๆ (1)

แสดงลักษณะของหุ่นยนต์ Qoopers ในรูปแบบต่างๆ (2)
ตัวอย่างเช่น การควบคุมหุ่นยนต์ Captain Alloy นั้น เมื่อเราเลือกประกอบตัวหุ่นยนต์นี้เสร็จเรียบร้อยแล้ว จากนั้นให้เราเลือกแตะที่แอพพลิเคชันของตัวหุ่นยนต์นี้ให้ตรงกัน โดยเมื่อเราเลือกตัวหุ่นยนต์แล้วก็จะแสดงดังรูปข้างล่างตามลำดับ

โหมดการควบคุมตัวหุ่นยนต์

โหมดเสียงเพลง

โหมดแสดงผลเมตริกซ์

โหมดเขียนโปรแกรม
สำหรับการควบคุมตัวหุ่นยนต์ Robobloq Qoopers จะใช้การเชื่อมต่อไร้สายผ่านบลูทูธ โดยในตัวอย่างการควบคุม Captain Alloy จะมีด้วยกับ 4 แบบคือ 1. การควบคุมตัวหุ่นยนต์ให้เคลื่อนที่ตามที่ต้องการด้วยจอยสติ๊กเสมือน 2. การให้ตัวหุ่นยนต์เล่นเสียงเพลงและเล่นเปียโน 3. การให้หุ่นยนต์แสดงผลภาพบนจอของตัวหุ่นแบบมาตรฐาน 4. กำหนดรูปแบบการแสดงผลต่างๆ ได้ สุดท้ายเป็นการพัฒนาหุ่นยนต์ด้วยการเขียนโปรแกรม
การเขียนโปรแกรมพัฒนาหุ่นยนต์ Robobloq Qoopers
การเขียนโปรแกรมสำหรับพัฒนาตัวหุ่นยนต์สามารถเลือกได้ 2 แบบคือ การพัฒนาผ่านโทรศัพท์มือถือและคอมพิวเตอร์ใช้งานทั่วไป ซึ่งการพัฒนาด้วยคอมพิวเตอร์จะค่อนข้างสะดวกสำหรับการเขียนโปรแกรมที่มีความซับซ้อนรวมทั้งการพัฒนาคำสั่งต่างๆ โดยตัวหุ่นยนต์ Robobloq Qoopers สามารถพัฒนาด้วยโปรแกรมสแครตช์ (Scratch 3.0) และโปรแกรมไพทอน (Python) นอกจากนี้ตัวโปรแกรม MyQode ยังสามารถพัฒนาร่วมกับบอร์ดประมวลผล Arduino Mega2560 ได้ โดยลักษณะของการเขียนโปรแกรมจะขึ้นอยู่กับความคิดสร้างสรรค์ของผู้เรียนนั้นเอง
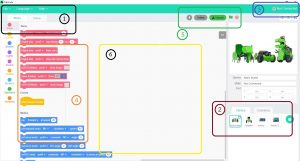
การเขียนโปรแกรมบนคอมพิวเตอร์
ในส่วนของการเขียนโปรแกรมควบคุมการทำงานของตัวหุ่นยนต์บนคอมพิวเตอร์ (PC) จะมีลักษณะของโปรแกรมที่แสดงดังรูปข้างบน โดยสามารถแบ่งเป็นกลุ่มคำสั่งการใช้งานได้เป็น 6 กลุ่มตามวงกลมตัวเลข คือ หมายเลข 1 จะเป็นการเลือกรูปแบบการเขียนโปรแกรม ที่ตำแหน่งแท็บเลือกโดยจะมี 2 รูปแบบคือ แบบสแครตช์ (Scratch) และภาษาไพทอน (Python) หมายเลข 2 เป็นการเลือกตัวหุ่นยนต์หรือบอร์ดทดลองในการพัฒที่ต้องการ หมายเลข 3 เป็นการแสดงสถานะการเชื่อมต่อตัวหุ่นยนตฺ์หรือบอร์ดที่กำลังพัฒนาว่าอยู่ในสถานะปกติ หมายเลข 4 แสดงกลุ่มคำสั่งสแครตช์สำหรับใช้ในการเขียนคำสั่งและเรียนรู้สำหรับพัฒนาหุ่นยนต์ หมายเลข 5 เป็นคำสั่งในการอัปโหลดโปรแกรม (Upload) ที่กำลังพัฒนาไปยังตัวหุ่นยนต์หรือบอร์ดทดลอง สุดท้ายหมายเลข 6 เป็นตำแหน่งพื้นที่สำหรับเขียนโปรแกรมคำสั่งต่างๆ

การเขียนโปรแกรมบนแท็บเล็ตหรือโทรศัพท์มือถือ

เมนู My Code สำหรับเลือกระดับการเรียนรู้

หน้าต่างสำหรับเมนู My Code สำหรับเขียนโปรแกรม
ในรูปข้างบนจะเป็นลักษณะของการเขียนโปรแกรมด้วยตัวเองที่เมนู My Code ซึ่งจะมีให้เลือก 2 ระดับคือระดับเบื้องต้น (Primary Programming) และระดับกลาง (Intermediate Programming) จากนั้นเมื่อเราเลือกระดับการเรียนรู้เรียบร้อยแล้ว ให้เราสร้างไฟล์เพื่อเขียนโปรแกรมต่อไป


ในส่วนทั้ง 2 รูปสุดท้ายจะเป็นการเลือกโปรแกรมตัวอย่างสำหรับเป็นแนวทางในการเรียนรู้เบื้องต้น หรือให้ผู้เรียนสามารถนำไปปรับใช้งานหรือเป็นไอเดียเพื่อใช้ในการควบคุมตัวหุ่นยนต์ในรูปแบบที่ตนเองต้องการ หรือตามโจทย์ที่กำหนดเพื่อใช้ในการเรียนรู้ได้เพิ่มมากยิ่งขึ้น.
การปรับเปลี่ยนตัวหุ่นยนต์ Robobloq Qoopers
สำหรับตัวหุ่นยนต์ Qoopers นี้จะสามารถปรับเปลี่ยนรูปแบบได้ถึง 6 แบบไม่ซ้ำกัน และมีแอพพลิเคชันสำหรับควบคุมตัวหุ่นยนต์ได้ในแต่ละแบบ ซึ่งผู้เรียนสามารถเรียนรู้การควบคุมและการทำงานได้เพิ่มขึ้น โดยเพิ่มความหลากหลายในการเรียนรู้เกี่ยวกับอุปกรณ์และโปรแกรมใช้งานร่วมต่างๆ นั้นเอง

ข้อมูลเกี่ยวกับตัวหุ่นยนต์เพิ่มเติมสำหรับ Robobloq Q-Scout
ข้อมูลประกอบการใช้งานหุ่นยนต์และการเรียนรู้ ผู้ใช้สามารถค้นหาได้ตามที่ลิงก์เว็บไซต์ (https://www.robobloq.com/product/Qoopers) รวมทั้งคู่มือที่เกี่ยวข้องต่างๆ แสดงข้างล่าง (https://www.robobloq.com/support/qoopers) ซึ่งจะรวมข้อมูลอัปเดตใหม่ที่เป็นปัจจุบันที่ช่วยให้เราใช้งานได้ง่ายและสะดวกยิ่งขึ้น ในส่วนสุดท้ายจะวิดีโอแนะนำวิธีการประกอบตัวหุ่นยนต์เพิ่มเติมอย่างเป็นขั้นตอน.
ข้อมูลโดย:
- https://www.robobloq.com/support/qoopers
- https://www.robobloq.com/product/Qoopers
- https://www.robobloq.com/support
.
ติดต่อสอบถามข้อมูลเพิ่มเติมได้ที่
บริษัท ซีเอ็ดยูเคชั่น จำกัด (มหาชน) 1858/87-90 ถนนเทพรัตน แขวงบางนาใต้ เขตบางนา กรุงเทพมหานคร 10260
โทรศัพท์ 0 2826 8263 โทรสาร 0 2826 8356-59 อีเมล์ stem@se-ed.com
.