.

ชุดทดลองแขนกล xArm 2.0 เป็นแขนกลที่สามารถโปรแกรมการทำงานได้ และสามารถเคลื่อนที่อิสระถึง 6 ตำแหน่ง (6DOF) ของแต่ละจุดต่อในตัวแขนกล ใช้การสื่อสารแบบบัสอนุกรมให้กับตัวเซอร์โวมอเตอร์สำหรับควบคุมการเคลื่อนที่ ซึ่งตัวเซอร์โวมอเตอร์ทั้งหมดมีฟังก์ชั่นของการส่งค่าป้อนกลับการทำงานที่เกิดขึ้นได้ เช่น ตำแหน่งการทำงาน ค่าแรงดันใช้งาน ค่าอุณหภูมิ เป็นต้น ทั้งยังรองรับการทำงานร่วมกันของหุ่นยนต์แบบหลายตัว เหมาะสำหรับผู้เรียนในระดับมัธยมและอาชีวศึกษา โดยเฉพาะสาขาไฟฟ้าอิเล็กทรอนิกส์, แมคคาทรอนิกส์, เครื่องกลและเทคนิคคอมพิวเตอร์ เป็นต้น ชุดทดลองการเรียนรู้แขนกล xArm2.0 รองรับการเขียนโปรแกรมสำหรับควบคุมตั้งแต่ระดับพื้นฐานด้วยโปรแกรมสแครช (Scratch) และระดับสูงขึ้นด้วยภาษาไพธอน (Python) โดยในชุดการทดลองจะมาควบคู่กับโมดูลอิเล็กทรอนิกส์มากกว่า 10 แบบ ซึ่งสามารถสร้างสรรค์โครงงานได้หลากหลายและง่ายๆ ตัวโมดูลเซนเซอร์สามารถใช้งานร่วมกันกับสินค้าของ Hiwonder ทุกรุ่น ซึ่งเราสามารถขยายฟังก์ชันการทำงานเพิ่มเติมได้ตามต้องการ
ชุดทดลองการเรียนรู้แขนกล xArm2.0 รองรับการเขียนโปรแกรมสำหรับควบคุมตั้งแต่ระดับพื้นฐานด้วยโปรแกรมสแครช (Scratch) และระดับสูงขึ้นด้วยภาษาไพธอน (Python) โดยในชุดการทดลองจะมาควบคู่กับโมดูลอิเล็กทรอนิกส์มากกว่า 10 แบบ ซึ่งสามารถสร้างสรรค์โครงงานได้หลากหลายและง่ายๆ ตัวโมดูลเซนเซอร์สามารถใช้งานร่วมกันกับสินค้าของ Hiwonder ทุกรุ่น ซึ่งเราสามารถขยายฟังก์ชันการทำงานเพิ่มเติมได้ตามต้องการ
ลักษณะทั่วไปของชุดแขนกล
ชุดทดลองแขนกล xArm 2.0 ประกอบด้วยฐานและโครงสร้างโลหะ โดยเซอร์โวมอเตอร์ตำแหน่งมือจับชิ้นงานจะเป็นรุ่น LX-1501 และส่วนที่เหลือ 5 ตัวจะเป็นรุ่น LX-15D, มีบอร์ดและกล่องควบคุมการทำงาน 2 ส่วนคือ บอร์ดควบคุมเซอร์โวมอเตอร์และกล่องควบคุม Core-X ซึ่งการออกแบบโครงสร้างและการเชื่อมต่อในแต่ละส่วนจะเป็นเอกลักษณ์ในรูปแบบ xArm 2.0 ตัวแขนรับชิ้นงานจะเป็นอลูมิเนียมที่แข็งแรงแต่น้ำหนักเบา กับสีที่เด่นชัดด้วยการพ่นทรายออกซิเดชั่นสำหรับการรักษาพื้นผิวทำให้ดูสวยงาม 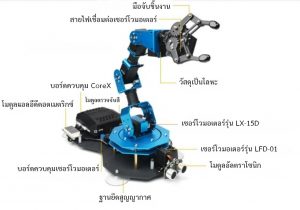
ลักษณะและองค์ประกอบชุดทดลองแขนกล xArm 2.0
ข้อมูลเฉพาะสำหรับชุดแขนกล
| การเขียนโปรแกรมควบคุม | Scratch/ Python |
| การเชื่อมต่ออุปกรณ์อินพุต | โมดูลอัลตราโซนิก, โมดูลอินฟราเรด, โมดูลสัญญาณเสียง, โมดูลตรวจจับสี |
| การเชื่อมต่ออุปกรณ์เอาต์พุต | โมดูลแอลอีดีดอตเมตริกซ์, เซอร์โวมอเตอร์รุ่น LFD-01, โมดูลบัซเซอร์, โมดูลแอลอีดี RGB |
| ตัวประมวลผล | ESP32 และ STM32 : ตัวเซอร์โวมอเตอร์ใช้ตัวประมวลผล STM32F104 |
| แหล่งจ่ายพลังงานไฟฟ้า | อินพุต : AC100-240V-50/60Hz, เอาต์พุต : DC 7.5V |
| การควบคุมแบบออฟไลน์ | ผ่านโมดูลบูลทูธ |
| ขนาดของชุดแขนกล | 433*275*155mm |
| น้ำหนักชุดทดลองแขนกล | 1.8kg |
อุปกรณ์ต่างๆ สำหรับชุดทดลองแขนกล xArm 2.0
ในชุดทดลองแขนกลจะมาพร้อมกับอุปกรณ์ต่างๆ ครบถ้วน เพื่อให้สามารถเรียนรู้ ทดลองใช้งานหรือการนำไปประยุกต์ใช้งานต่างๆ ได้ง่าย ทั้งในส่วนของแหล่งจ่ายไฟเลี้ยง, อุปกรณ์ควบคุมภายนอก, โปรแกรมใช้งานกับคอมพิวเตอร์สำหรับควบคุมและพัฒนาเพิ่มเติม โปรแกรมแอพพลิเคชั่นบนโทรศัพท์มือถือ รวมถึงอุปกรณ์ต่อร่วมอินพุตและเอาต์พุตต่างๆ สำหรับการเพิ่มฟังก์ชั่นการใช้งานให้กับชุดทดลองแขนกล 
แสดงแหล่งจ่ายไฟเลี้ยง อุปกรณ์และเครื่องมือในชุดทดลองแขนกล
| 1. สกรูยึดบอร์ดรวมเสาสำหรับยึดบอร์ดและอุปกรณ์ขนาดเล็กต่างๆ | 10. ฐานยึดเซอร์โวมอเตอร์สำหรับโมดูลอัลตราโซนิก |
| 2. เซอร์โวมอเตอร์รุ่น LFD-01M | 11. สายเชื่อมต่อข้อมูลกับคอมพิวเตอร์ |
| 3. อุปกรณ์ใช้งานร่วมกับเซอร์โวมอเตอร์ LFD-01M | 12. โมดูลตรวจจับสี |
| 4. รีโมทควบคุมแบบอินฟราเรด | 13. โมดูลแอลอีดีดอตเมตริกซ์ |
| 5. แหล่งจ่ายไฟเลี้ยงกระแสตรงขนาด 7.5V/5A | 14. ลูกเต๋าไม้สี่เหลี่ยม |
| 6. จอยสติกควบคุม PS2 | 15. ฐานยึดแบบสุญญากาศ |
| 7. โมดูลอัลตราโซนิก | 16. ชุดทดลองแขนกล xArm2.0 แบบประกอบเสร็จ (บอร์ดควบคุมเซอร์โวมอเตอร์ ตัวรับสัญญาณควบคุมจอยสติกและกล่องควบคุม Core-X) |
| 8. ฐานยึดเซอร์โวมอเตอร์แบบตัวแอล | 17. กระดาษแผนที่สำหรับการทดลอง |
| 9. ไขควงสำหรับใช้ประกอบ |

ตัวแขนกลด้านหลัง ฐานยึดสุญญากาศและกระดาษแผนที่สำหรับทดลอง
อุปกรณ์เซนเซอร์และการประกอบ
| อุปกรณ์ | จำนวน | อุปกรณ์ | จำนวน |
| โมดูลตรวจจับสี | 1 | โมดูลอัลตราโซนิก | 1 |
| โมดูลแอลอีดีดอตเมตริกซ์ | 1 | บอร์ดควบคุม Core-X | 1 |
| เซอร์โวมอเตอร์ LFD-01M | 1 | สกรูขนาด M2 ยาว 12 มม. | 2 |
| น๊อตตัวเมียขนาด M2 | 2 | สกรูขนาด M2 ยาว 6 มม. | 1 |
| สกรูเสาไนลอนสีดำ | 4 | ก้านยึดแกนเซอร์โวขนาดเล็ก | 1 |
| สกรูเกลียวปล่อยขนาด M2 ยาว 6 มม. | 2 | สกรูขนาด M4 ยาว 8 มม. | 6 |
| น๊อตตัวเมียขนาด M4 | 2 | เสาไนลอนขนาด M3 ยาว 8 มม. | 4 |
| เสาไนลอนขนาด M3 ยาว 5 มม. | 2 | สกรูขนาด M3 ยาว 5 มม. | 12 |
| ฐานยึดแบบตัวแอล | 1 | บอร์ดเชื่อมต่อโมดูลอัลตราโซนิก | 1 |
โปรแกรมควบคุมการทำงานชุดทดลองแขนกล
1. โปรแกรม xArm 2.0 โปรแกรม xArm 2.0 เป็นโปรแกรมทำหน้าที่หลักสำหรับการควบคุมการเคลื่อนที่ให้กับเซอร์โวมอเตอร์ทั้ง 6 ตัว ด้วยการสื่อสารกับบอร์ดควบคุม และหมายเลขประจำตัวเซอร์โวมอเตอร์ (ID) โดยเราสามารถโปรแกรมและปรับตำแหน่งการเคลื่อนที่, การปรับค่าความเบี่ยงเบนของตัวเซอร์โวมอเตอร์, การดาวน์โหลดและกระทำกลุ่มคำสั่ง, การสร้างลำดับการทำงานแบบกำหนดให้และแบบใช้การจัดท่าทางการเคลื่อนที่เอง ทั้งนี้จะช่วยให้เราเลือกรูปแบบการจัดลำดับการทำงานได้ตามความเหมาะสม และโปรแกรมยังสามารถปรับแต่งและตรวจสอบการทำงานของตัวเซอร์โวมอเตอร์ได้อีกด้วย 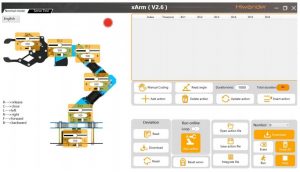
โปรแกรมควบคุมผ่านคอมพิวเตอร์สำหรับ xArm 2.0

แสดงหน้าต่างโปรแกรมสำหรับปรับแต่งการทำงานเซอร์โวมอเตอร์

บอร์ดควบคุมเซอร์โวมอเตอร์
2. โปรแกรม WonderCode โปรแกรม WonderCode เป็นเครื่องมือในการเขียนโปรแกรมได้ทั้งในรูปแบบแบบกราฟิก, คำสั่งโปรแกรมด้วยการลากวางในรูปแบบบล็อก (Scratch) และภาษาไพธอน (Python) สำหรับการเขียนโปรแกรมแบบตัวอักษร (Text Mode) ทั้งนี้เพื่อให้รองรับการเรียนรู้ สำหรับการเขียนโปรแกรมคอมพิวเตอร์ได้หลายระดับและโปรแกรมคำสั่งจะใช้ร่วมกับตัวควบคุม CoreX 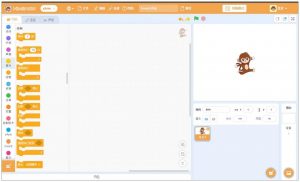
ลักษณะของโปรแกรม WonderCode

ลักษณะของกล่องควบคุม CoreX
โปรแกรมสำหรับพัฒนาชุดทดลองแขนกล
ในส่วนของโปรแกรมที่ใช้ในการพัฒนาชุดทดลองแขนกล XArm 2.0 ให้สามารถทำงานตามที่เราต้องการ โดยเขียนคำสั่งจะมีด้วยกัน 2 รูปแบบคือ โปรแกรมสแครช (Scratch) และภาษาไพธอน (Python) โดยทั้งสองส่วนจะอยู่ในโปรแกรม WonderCode ลักษณะของโปรแกรมสแครช จะเป็นลักษณะของบล็อกและมีพื้นที่สคริปต์สำหรับวางบล็อกคำสั่งในการเขียนคำสั่งต่างๆ นอกจากนี้จะมีกลุ่มบล็อกคำสั่งและปุ่มขยายฟังก์ชัน เพื่อให้เราใช้คำสั่งควบคุมได้หลายรูปแบบ เช่น การเคลื่อนที่, การรับคำสั่งควบคุม, การใช้คำสั่งทางคณิตศาสตร์, การใช้คำสั่งทำงานซ้ำเป็นต้น ลักษณะของโปรแกรมสแครชแสดงในรูปข้างล่าง 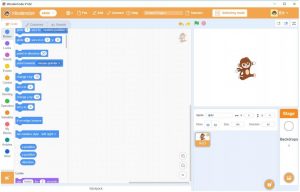
โปรแกรม WonderCode เมื่อเราเปิดใช้งาน
นอกจากโปรแกรมสแครชจะเหมาะสำหรับการเรียนรู้เบื้องต้นแล้ว เรายังสามารถเขียนโปรแกรมแบบตัวอักษรทั่วไปได้ ซึ่งช่วยให้สามารถควบคุมการทำงานได้อย่างอิสระหรือซับซ้อนเพิ่มขึ้น และเหมาะกับผู้ที่มีพื้นฐานในการเขียนโปรแกรมทั่วไปบ้าง โดยการใช้ภาษาไพธอน (Python Programming) ซึ่งเราสามารถเปลี่ยนโหมดสำหรับการเขียนโปรแกรมพัฒนาชุดทดลองแขนกลและการแสดงผลได้อย่างเหมาะสม 
รูปแสดงลักษณะการเขียนโปรแกรมด้วยภาษาไพธอน
การควบคุมการทำงานแขนกล
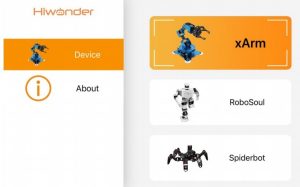
1. การควบคุมด้วยจอยสติก เราสามารถควบคุมได้อย่างอิสระและเป็นการควบคุมแบบไร้สาย ทั้งนี้จะมีโหมดการควบคุม 2 แบบคือ โหมดการควบคุมเป็นกลุ่มคำสั่ง (ชุดคำสั่งที่เขียนโปรแกรมเสร็จแล้ว) และแบบโหมดการควบคุมเซอร์โวมอเตอร์ทีละตัว  2. การควบคุมผ่านโทรศัพท์มือถือ เป็นการใช้แอพพลิเคชั่นในการควบคุม รวมถึงการเขียนลำดับการทำงานคำสั่ง ซึ่งโปรแกรมแอพพลิเคชั่นสำหรับติดตั้งเพื่อควบคุมชุดทดลองแขนกล จะมีทั้งระบบปฏิบัติการแอนดรอยด์ (Android) และไอโอเอส (iOS)
2. การควบคุมผ่านโทรศัพท์มือถือ เป็นการใช้แอพพลิเคชั่นในการควบคุม รวมถึงการเขียนลำดับการทำงานคำสั่ง ซึ่งโปรแกรมแอพพลิเคชั่นสำหรับติดตั้งเพื่อควบคุมชุดทดลองแขนกล จะมีทั้งระบบปฏิบัติการแอนดรอยด์ (Android) และไอโอเอส (iOS) 
 3. การควบคุมด้วยเม้าคอมพิวเตอร์ โดยการเชื่อมต่อเม้าส์คอมพิวเตอร์เข้ากับบอร์ดควบคุม โดยบอร์ดควบคุมจะรับข้อมูลจากเม้าส์และประมวลผล ซึ่งสามารถใช้เม้าส์ได้ทั้งแบบมีสายและไร้สาย โดยเม้าส์จะส่งคำสั่งการตอบสนองให้เคลื่อนที่และควบคุมการทำงานให้กับเซอร์โวมอเตอร์ในแต่ละจุด
3. การควบคุมด้วยเม้าคอมพิวเตอร์ โดยการเชื่อมต่อเม้าส์คอมพิวเตอร์เข้ากับบอร์ดควบคุม โดยบอร์ดควบคุมจะรับข้อมูลจากเม้าส์และประมวลผล ซึ่งสามารถใช้เม้าส์ได้ทั้งแบบมีสายและไร้สาย โดยเม้าส์จะส่งคำสั่งการตอบสนองให้เคลื่อนที่และควบคุมการทำงานให้กับเซอร์โวมอเตอร์ในแต่ละจุด  4. การควบคุมแบบออฟไลน์ การควบคุมแบบออฟไลน์จะเป็นการไม่ใช้โปรแกรมในการควบคุม แต่จะเป็นการโปรแกรมการทำงานให้ตัวแขนกลก่อนและสามารถกระทำกลุ่มคำสั่งที่ดาวน์โหลดไว้ในตัวเองแบบอัตโนมัติ
4. การควบคุมแบบออฟไลน์ การควบคุมแบบออฟไลน์จะเป็นการไม่ใช้โปรแกรมในการควบคุม แต่จะเป็นการโปรแกรมการทำงานให้ตัวแขนกลก่อนและสามารถกระทำกลุ่มคำสั่งที่ดาวน์โหลดไว้ในตัวเองแบบอัตโนมัติ 
ตัวอย่างการทดลองแขนกล xArm 2.0
1. การทดลองแสดงผลด้วยดอตเมทริกซ์ (Dot Matrix Display) ในชุดทดลองแขนกล xArm 2.0 จะมีตัวอย่างโปรแกรมให้ทดลองการใช้งานหรือสำหรับเรียนรู้การทำงานเบื้องต้น โดยเราสามารถนำไฟล์จากโฟลเดอร์ “Basic Lessons” และทำการดาวน์โหลดโปรแกรม “Dot Matrix Display” ไปยังกล่องควบคุม
 แสดงตำแหน่งของไฟล์ Dot Matrix Display
แสดงตำแหน่งของไฟล์ Dot Matrix Display

โปรแกรมสำหรับการแสดงผลด้วยดอตเมทริกซ์
หลังจากที่ดาวน์โหลดโปรแกรมเรียบร้อยแล้วโมดูลแอลอีดีดอตเมตริกซ์จะแสดงข้อความ “Hi”, “I”, “AM”, “xArm2.0” และจะแสดงผลใหม่เองอัตโนมัติ 
ลักษณะข้อความที่แสดงบนโมดูลแอลอีดีดอตเมตริกซ์
2. การทดลองแอลอีดีไฟกระพริบ (LED Light Flashes) ให้เรานำไฟล์โปรแกรมจากโฟลเดอร์ “Basic Lessons” และทำการดาวน์โหลดโปรแกรม “LED Light Flashes” ไปยังกล่องควบคุม 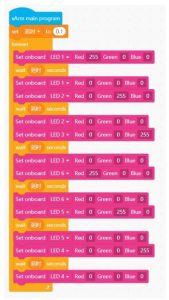
โปรแกรมสำหรับการทดลอง LED Light Flashes
หลังจากที่ดาวน์โหลดโปรแกรมเรียบร้อยแล้ว แอลอีดี RGB ในกล่องควบคุมจะติดไปวนรอบๆ กล่องและเปลี่ยนสีตามลำดับ 
ลักษณะการแสดงผลแอลอีดีที่เกิดขึ้น
3. การทดลองควบคุมด้วยเสียง (Sound Control) ให้เรานำไฟล์จากโฟลเดอร์ “Basic Lessons” และทำการดาวน์โหลดโปรแกรม “Sound Control” ไปยังกล่องควบคุม และวางลูกเต๋าไม้สี่เหลี่ยมในตำแหน่งที่ระบุกระดาษแผนที่สำหรับทดลองดังในรูปข้างล่าง 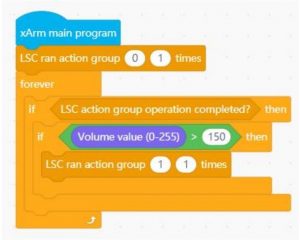
โปรแกรมสำหรับการทดลอง Sound Control

แสดงการวางลูกเต๋าไม้สี่เหลี่ยมในตำแหน่งที่ระบุกระดาษแผนที่
หลังจากที่ดาวน์โหลดโปรแกรมเรียบร้อยแล้ว ให้เราเคาะใกล้ๆ ชุดทดลองแขนกลเพื่อส่งสัญญาณเสียง และเมื่อชุดทดลองแขนกลได้รับสัญญาณเสียงก็จะหยิบลูกเต๋าไม้สี่เหลี่ยมตามที่กำหนดไว้ 
ผลที่ได้จาการทดลอง Sound Control ที่เกิดขึ้น
วิดีโอแนะนำชุดทดลองแขนกล
สำหรับวิดีโอแนะนำการใช้งานเบื้องต้น ฟังก์ชั่นการใช้งานรูปแบบต่างๆ รวมถึงการประยุกต์ชุดทดลองแขนกล xArm 2.0 จะแสดงข้างล่างนี้.
.
.
.
ติดต่อสอบถามรายละเอียดและข้อมูลเพิ่มเติมที่
บริษัท ซีเอ็ดยูเคชั่น จำกัด (มหาชน) 1858/87-90 ถนนเทพรัตน แขวงบางนาใต้ เขตบางนา กรุงเทพมหานคร 10260 โทรศัพท์ 0 2826 8263 โทรสาร 0 2826 8356-59
www.se-edstemeducation.com, E-mail: stem@se-ed.com Tel. 02 826 8240 (ข้อมูลด้านเทคนิค), 02 826 8222 (สั่งซื้อและบริการ)