
แปลและเรียบเรียง : ณัฐพนธ์ จงฤกษ์มงคล
ชุดทดลองหุ่นยนต์ขับเคลื่อน 4 ล้อ แบบมีแขนจับชิ้นงาน (4WD Robot Arm Smart Car) เป็นชุดทดลองการเรียนรู้เขียนโปรแกรมคอมพิวเตอร์และการทำงานของแมคคานิกส์ที่จะทำงานร่วมกัน ซึ่งจุดเด่นของชุดทดลองนี้จะใช้บอร์ดควบคุมไมโครคอนโทรลเลอร์ Arduino UNO ซึ่งสามารถใช้งานได้ฟรี (Open source) และสามารถเรียนรู้การทำงานได้จากข้อมูลทั่วไปในอินเตอร์เน็ตและราคาไม่แพงมากนัก ทั้งนี้ในชุดทดลองมาพร้อมคู่มือการใช้งาน ตัวอย่างการเขียนโปรแกรมและวิดีโอแนะนำการประกอบตัวหุ่นยนต์และการใช้งานให้ผู้เรียนเข้าใจได้ง่ายยิ่งขึ้น.
อุปกรณ์ต่างๆ ในชุดการทดลองหุ่นยนต์ขับเคลื่อน 4 ล้อ
ในส่วนของอุปกรณ์สำหรับชุดทดลองหุ่นยนต์ขับเคลื่อน 4 ล้อ แบบมีแขนจับชิ้นงานนี้ จะมีอุปกรณ์ต่างๆ ให้ผู้เรียนทดลองใช้งานได้หลายรูปแบบ ทั้งในส่วนของมอเตอร์กระแสตรง เซอร์โวมอเตอร์ อุปกรณ์วัดระยะทางด้วยโมดูลอัลตร้าโซนิกส์, การรับสัญญาณอิรฟราเรด, การรับสัญญาณควบคุมจากโมดูลบูลทูธ เป็นต้น
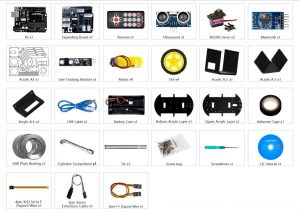
ทั้งนี้ส่วนของอุปกรณ์ต่างๆ ของชุดทดลองหุ่นยนต์สามารถแบ่งเป็นกลุ่มๆ ได้ดังนี้คือ บอร์ดควบคุม Arduino UNO และบอร์ดขยายสำหรับบอร์ดขยายการเชื่อมต่ออุปกรณ์ต่างๆ (Arduino shield), อุปกรณ์รับสัญญาณอินพุตต่างๆ เช่น โมดูลเซนเซอร์อินฟราเรด, โมดูลอัลตร้าโซนิกส์และโมดูลบลูทูธ เป็นต้น ในส่วนของอุปกรณ์ทางด้านเอาต์พุต เช่น เซอร์โวมอเตอร์, มอเตอร์พัดลมแบบกระแสตรง ถัดมาจะเป็นชุดโครงสร้างของตัวหุ่นยนต์, ล้อหุ่นยนต์, ไขควงสำหรับประกอยตัวหุ่นยนต์ และซีดีสำหรับข้อมูลประกอบการเรียนรู้ตัวสำหรับตัวหุ่นยนต์
การควบคุมหุ่นยนต์หุ่นยนต์ขับเคลื่อน 4 ล้อ
สำหรับการควบคุมตัวหุ่นยนต์ขับเคลื่อน 4 ล้อจะสามารถเลือกได้ 2 แบบคือ การควบคุมผ่านรีโมทอินฟราเรดและการควบคุมผ่านโปรแกรมแอพพลิเคชั่นบนโทรศัพท์มือถือ ซึ่งการเลือกวิธีการควบคุมตัวหุ่นยนต์ในแต่ละแบบนั้น จะมีโปรแกรมพัฒนาสำหรับบอร์ดควบคุมที่จะรองรับไว้ในชุดการทดลอง อีกแบบหนึ่งสำหรับการเคลื่อนที่ตัวหุ่นยนต์ จะมีอุปกรณ์เซนเซอร์ต่างๆ เพื่อให้ตัวหุ่นยนต์เอง สามารถเคลื่อนที่ได้อย่างอ้ตโนมัติ เช่น เซนเซอร์โมดูลอัลตร้าโซนิกส์ และเซนเซอร์อินฟราเรด เป็นต้น

วิธีการและขั้นตอนการประกอบตัวหุ่นยนต์ขับเคลื่อน 4 ล้อ
ในการประกอบตัวหุ่นยนต์ขับเคลื่อน 4 ล้อนี้ จะมีเอกสารแนะนำการประกอบตัวหุ่นยนต์อย่างเป็นขั้นตอน โดยจะมีคู่มือการใช้งานและการประกอบมาในชุดการทดลอง รวมทั้งวิดีโอซึ่งจะมีเนื้อหาเกี่ยวกับการใช้งานและการควบคุมตัวหุ่นยนต์ผ่านแอพพลิเคชั่นบนโทรศัพท์มือถือ และวิดีโอแนะนำการใช้งานและการประกอบตัวหุ่นยนต์ รวมทั้งการประกอบชุดบอร์ดควบคุมการทำงาน ซึ่งไฟล์วิดีโอจะมาพร้อมในชุดการทดลองหุ่นยนต์นี้ด้วยเช่นกัน

การเขียนโปรแกรมควบคุมตัวหุ่นยนต์ขับเคลื่อน 4 ล้อ
สำหรับโปรแกรมที่ใช้ในการพัฒนาตัวหุ่นยนต์นั้น จะเป็นภาษาซี (C++) ที่ผู้เรียนสามารถดาวน์โหลดมาใช้งานได้ฟรีในเวอร์ชั่นใหม่ที่ https://www.arduino.cc/en/software หรือสามารถใช้งานในเวอร์ชั่น 1.8.0 ได้เช่นกัน ซึ่งจะมาพร้อมในชุดทดลองนี้ ลักษณะของเว็บไซต์สำหรับดาวน์โหลดโปรแกรมแสดงในรูปข้างล่าง นอกจากนี้ในชุดทดลองจะมีตัวอย่างโปรแกรมต่างๆ สำหรับใช้ในการเรียนรู้การทำงานของตัวหุ่นยนต์เป็นส่วนๆ เพื่อให้เข้าใจการทำงานของตัวหุ่นยนต์โดยละเอียด

แสดงลักษณะของหน้าต่างดาวน์โหลดโปรแกรม Arduino IDE Software

การทดลองโปรแกรมและการเชื่อมต่อบอร์ดควบคุมหุ่นยนต์เบื้องต้น

ลักษณะของคำสั่งการโปรแกรมด้วยโปรแกรม Arduino IDE Software
ผังการต่ออุปกรณ์ต่างๆ ให้กับหุ่นยนต์
สำหรับผังการต่ออุปกรณ์ต่างๆ ให้กับตัวหุ่นยนต์นั้น จะแสดงดังในรูปข้างล่างโดยผู้เรียนสามารถศึกษาโปรแกรมการทำงานที่สัมพันธ์กับการต่ออุปกรณ์ต่างๆ ได้ทุกส่วน ทั้งนี้ในเบื้องต้นเมื่อผู้เรียนเข้าใจหลักการทำงานของตัวหุ่นยนต์ทั้งหมด จะสามารถปรับเปลี่ยนรูปแบบการควบคุมตัวหุ่นยนต์ได้ตามที่ต้องการ และช่วยให้เข้าใจการทำงานของอุปกรณ์ต่างๆ ซึ่งจะทำงานสัมพันธ์ระหว่างกันทั้งหมดในการทำงานของตัวหุ่นยนต์
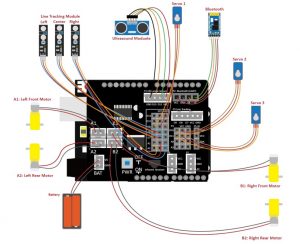
สำหรับการประกอบอุปกรณ์ต่างๆ โดยปกติจะต้องการจัดวางตำแหน่งของตัวอุปกรณ์ตามตำแหน่งที่กำหนด รวมทั้งการจัดวางสายไฟให้กับตัวหุ่นยนต์อย่างเรียบร้อย ลักษณะของการประกอบตัวหุ่นยนต์จะแนะนำในวิดีโอการประกอบเพื่อให้ผู้เรียนประกอบได้อย่างถูกต้อง
ตัวอย่างการทดลองหุ่นยนต์ขับเคลื่อน 4 ล้อ
ในบทเรียนการทดลองตัวหุ่นยนต์นั้น จะเริ่มต้นด้วยการอธิบายแนวความคิดของการทดลองโครงงาน การศึกษาเกี่ยวกับตัวอุปกรณ์ที่นำมาใช้งาน การต่อวงจรระหว่างอุปกรณ์และบอร์ดควบคุมการทำงาน และการเขียนโปรแกรมควบคุมการทำงานในเบื้องต้น โดยเราสามารถสังเกตการทำงานและผลที่ได้จากการทดลองควบคู่กันไป ลำดับตัวอย่างการทดลองแสดงในรูปข้างล่าง
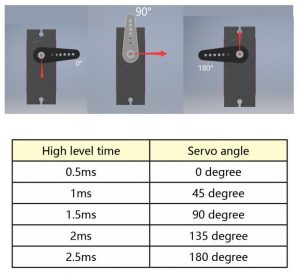
แนวความคิดของการควบคุมเซอร์โวมอเตอร์ให้กับตัวหุุ่นยนต์

ขั้นตอนการประกอบโครงสร้างสำหรับตัวหุ่นยนต์
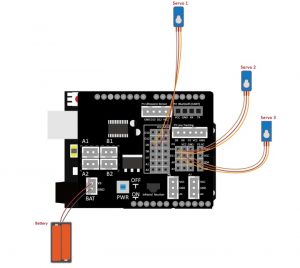
การต่ออุปกรณ์สำหรับการทดลองหุ่นยนต์
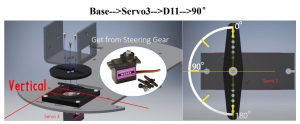
รูปแสดงลักษณะของการหมุนฐานชุดแขนสำหรับตัวหุ่นยนต์
การควบคุมหุ่นยนต์ขับเคลื่อน 4 ล้อด้วยรีโมทอินฟราเรด
สำหรับหุ่นยนต์ขับเคลื่อน 4 ล้อ แบบมีแขนจับชิ้นงานนี้ สามารถควบคุมผ่านรีโมทอินฟราเรดที่มาในชุดซึ่งควบคุมการทำงานได้ 2 ส่วนคือ ส่วนแรกสำหรับการเคลื่อนที่ของตัวหุ่นยนต์จะใช้ตำแหน่งกลุ่มของปุ่มกดด้านบน 4 ตัวตามทิศทางของลูกศรและสามารถควบคุมได้ง่าย ในส่วนที่สอง จะเป็นการควบคุมชุดแขนจับชิ้นงานให้กับตัวหุ่นยนต์ โดยในกลุ่มของปุ่มกดบนรีโมทนั้น จะประกอบด้วยตำแหน่งหมายเลข 2 และ 8 ทำหน้าที่ยกและกดลงของตัวแขนหุ่นยนต์ ที่ปุ่มหมายเลข 4 และ 6 ทำหน้าที่ตัวแขนหุ่นยนต์ สุดท้ายที่ปุ่มหมายเลข 7 และ 9 ทำหน้าที่จับและปล่อยชิ้นงานนั้นเอง
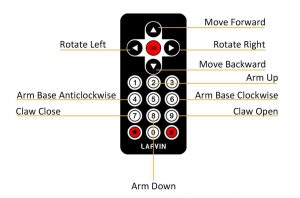
รูปแสดงลักษณะของตำแหน่งปุ่มกดในการควบคุมตัวหุ่นยนต์
การควบคุมหุ่นยนต์ขับเคลื่อน 4 ล้อด้วยแอพพลิเคชั่น
ในการควบคุมหุ่นยนต์ผ่านแอพพลิเคชั่นบนโทรศัพท์มือถือนั้น ผู้เรียนสามารถติดตั้งโปรแกรมแอพพลิเคชั่น (*.apk) ในซีดีชุดทดลอง และเมื่อเราเปิดใช้งานแอพพลิเคชั่นจะแสดงลักษณะดังในรูปข้างล่าง โดยแอพพลิเคชั่นจะแบ่งเป็นกลุ่มคำสั่งการใช้งาน 4 กลุ่มคือ กลุ่มแรก (ด้านซ้ายมือ) ควบคุมการเคลื่อนที่ของตัวหุ่นยนต์ กลุ่มที่สอง (ด้านขวามือ) การควบคุมชุดแขนตัวหุ่นยนต์ กลุ่มที่สาม (ด้านล่างมีให้เลือก 5 โหมด) เป็นการเลือกโหมดการทำงานแบบสำเร็จให้กับตัวหุ่นยนต์ และกลุ่มสุดท้าย (อยู่ตรงกลางมีให้เลือก 3 ระดับความเร็ว) เป็นการปรับความเร็วการเคลื่อนที่สำหรับหุ่นยนต์

แสดงลักษณะของแอพพลิเคชั่นเมื่่อเปิดใช้งานสำหรับควบคุมหุ่นยนต์

การเชื่อมต่อระหว่างหุ่นยนต์และแอพพลิเคชั่นผ่านบลูทูธ (การคลิกเลือกการเชื่อมต่อ)

การเชื่อมต่อระหว่างหุ่นยนต์และแอพพลิเคชั่นผ่านบลูทูธ (การเลือกอุปกรณ์เชื่อมต่อ)
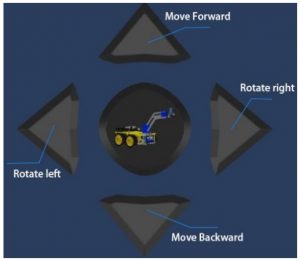
ตำแหน่งการควบคุมการเคลื่อนที่ในแอพพลิเคชั่น
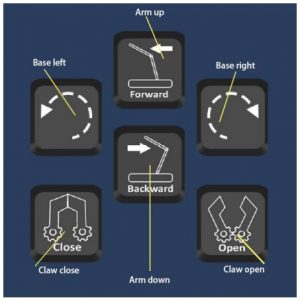
ตำแหน่งการควบคุมแขนจับชิ้นงานในแอพพลิเคชั่น

การเลือกโหมดการทำงาแบบนสำเร็จให้กับตัวหุ่นยนต์

การปรับความเร็วของการเคลื่อที่ให้กับตัวหุ่นยนต์
สำหรับชุดทดลองหุ่นยนต์ขับเคลื่อน 4 ล้อ แบบมีแขนจับชิ้นงานนี้ เป็นชุดทดลองหุ่นยนต์อีกแบบหนึ่งที่มีความแตกต่างจากหุ่นยนต์ในแบรนด์ของ LAFVIN ทั้งนี้จะเป็นการฝึกให้ผู้เรียนได้เรียนรู้โครงสร้างของตัวหุ่นยนต์ในรูปแบบใหม่ และได้ประสบการณ์ในการควบคุมตัวหุ่นยนต์ รวมทั้งแก้ไขปัญการที่เกิดขึ้นในการทดลอง รวมทั้งเพื่อเป็นพื้นฐานการเรียนรู้ในระดับที่สูงขึ้น
.
ติดต่อสอบถามข้อมูลเพิ่มเติมได้ที่
บริษัท ซีเอ็ดยูเคชั่น จำกัด (มหาชน) 1858/87-90 ถนนเทพรัตน แขวงบางนาใต้ เขตบางนา กรุงเทพมหานคร 10260
โทรศัพท์ 0 2826 8263 โทรสาร 0 2826 8356-59 อีเมล์ stem@se-ed.com
.
.