
หุ่นยนต์ ROS MASTER X3 PLUS เป็นหุ่นยนต์ที่สามารถเคลื่อนที่ได้รอบทิศทางซึ่งพัฒนาขึ้นโดยใช้ระบบปฏิบัติการ ROS (Robot Operating System) ที่รองรับบอร์ดควบคุมได้ถึง 4 แบบคือ Jetson NANO 4GB/Xavier NX/TX2 NX และ Raspberry Pi 4B มาพร้อมอุปกรณ์ต่อร่วมสำหรับใช้งานต่างๆ เช่น อุปกรณ์ตรวจจับ lidar, กล้องถ่ายภาพที่มีระยะความลึก, แขนหุ่นยนต์ 6DOF, มอเตอร์ขับหุ่นยนต์กำลังสูงรุ่น 520, โมดูลโต้ตอบการจดจำเสียงและหน้าจอแสดงผลความละเอียดสูง (HD) ขนาด 7 นิ้ว

ตัวหุ่นยนต์สามารถรับรู้และควบคุมการใช้งานในรูปแบบต่างๆ เช่น การทำแผนที่และการนำทางผ่านแอพพลิเคชั่น, การควบคุมตัวหุ่นยนต์แบบอัตโนมัติ, การจดจำคุณลักษณะและท่าทางของมนุษย์, การควบคุมการจำลองแขนกลด้วยโปรแกรม moveIt และการควบคุมแบบซิงโครนัสร่วมกับหุ่นยนต์หลายตัว ผ่านโทรศัพท์มือถือ, จอยสติกส์, การควบคุมผ่านคีย์บอร์ดคอมพิวเตอร์ โดยตัวหุ่นยนต์จะมาพร้อมสื่อวิดีโอ สำหรับการเรียนรู้รวม 124 วิดีโอ โดยจะมีคำบรรยายที่เป็นภาษาอังกฤษและภาษาจีนให้ใช้เรียนรู้กับหุ่นยนต์ได้ฟรี

อุปกรณ์ใช้งานร่วมกับตัวหุ่นยนต์ที่สำคัญ ROSMASTER X3 PLUS
คุณสมบัติหุ่นยนต์ ROSMASTER X3 PLUS
1. หุ่นยนต์ ROSMASTER X3 PLUS ทำงานร่วมกับอุปกรณ์ตรวจจับ lidar ที่สามารถใช้งานได้ทั้งในและนอกสถานที่ ซึ่งจะทำหน้าที่สร้างแบบจำลอง 3 มิติ สำหรับการสร้างแผนที่การนำทางและการวัดวัดระยะทางของวัตถุโดยรอบ 30 เซนติเมตร
2. กล้องจับภาพความละเอียดสูง (HD) Astra Pro Depth Camera พร้อมบอกระยะลึกของภาพที่เหมาะสำหรับใช้ร่วมกับการพัฒนาทางด้านปัญญาประดิษฐ์ (AI) เพื่อใช้ในการประมวลผลภาพ 3 มิติ การนำทางรวมถึงการสร้างแผนที่
3. ตัวหุ่นยนต์ ROSMASTER X3 PLUS จะมาพร้อมแขนกลแบบ 6DOF ที่ให้ความแม่นยำของการเคลื่อนที่สูง (0.5mm) และที่ปลายแขนกลจะมีมือจับชิ้นงานในตัว และสามารถจับชิ้นงานที่มีน้ำหนักถึง 500 กรัม และผู้ใช้สามารถจำลองการทำงานผ่านโปรแกรม moveIt simulation
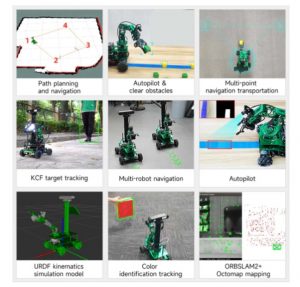
ตัวย่างเนื้อหาสำหรับการเรียนรู้หุ่นยนต์ ROSMASTER X3 PLUS
4. ในชุดทดลองหุ่นยนต์จะมาพร้อมบอร์ดประมวลผลทางด้านเสียง (Speech recognition) รุ่น CSK4002 ที่จะช่วยให้ตัวหุ่นยนต์สามารถควบคุมการทำงานด้วยคำสั่งเสียงได้อีกรูปแบบหนึ่ง
5. ตัวหุ่นยนต์จะมีจอแสดงผลสำหรับแสดงข้อมูลการทำงาน (Debug) ขนาด 7 นิ้ว หรือการติดตั้งโปรแกรมต่างๆ การเชื่อมต่อสัญญาณไวไฟ นอกจากนี้ตัวจอจะเป็นแบบทัชสกรีน (Touch screen) ที่สามารถรับคำสั่งจากผู้ใช้งานได้ทันที
6. ตัวถังของหุ่นยนต์จะเป็นอลูมิเนียมอัลลอย (Aluminium alloy) และล้อขับเคลื่อนแบบแมคคานั่ม (Mecanum Wheel) มีระบบการทรงตัวและรับสั่นสะเทือนของตัวหุ่นยนต์ (Pendulum suspension) เพื่อให้ตัวหุ่นยนต์เคลื่อนที่ได้อย่างมีประสิทธิภาพ

ลักษณะของกล่องบรรจุตัวหุ่นยนต์ ROSMASTER X3 PLUS
7. การควบคุมและการเชื่อมต่อข้ามแพลตฟอร์มสำหรับหุ่นยนต์ ได้ถึง 6 รูปแบบคือ การควบคุมผ่านแอพพลิเคชั่นบนโทรศัพท์มือถือ (Remote control app) ซึ่งรองรับบนระบบปฏิบัติการแอนดรอยด์ (Android), การควบคุมด้วยจอยสติกส์ (Real handle control), การควบคุมผ่านคอมพิวเตอร์ (Computer keyboard control), การควบคุมผ่านโปรแกรมสนับสนุน jupyter lab programming และการควบคุมผ่านโปรแกรมระบบปฏิบัติการ ROS