
หุ่นยนต์ ROS Transbot เป็นหุ่นยนต์เพื่อการศึกษาและเรียนรู้ บนพื้นฐานการเขียนโปรแกรมด้วยระบบปฏิบัติการ ROS (Robot Operating System) โดยใช้ภาษา Python ซึ่งเป็นภาษาโปรแกรมในการพัฒนาตัวหุ่นยนต์ และในชุดหุ่นยนต์มาพร้อมอุปกรณ์ประกอบการเรียนรู้คุณภาพสูงหลายแบบเช่น บอร์ด Jetson NANO 4GB, Lidar, กล้องความละเอียดสูงและกล้องให้ระยะความลึก ฯลฯ
ทั้งนี้ชุดทดลองหุ่นยนต์สามารถรับรู้ การควบคุมความเคลื่อนไหว, การควบคุมหุ่นยนต์ระยะไกล, การนำทางแผนที่, การติดตาม, การหลบหลีกสิ่งกีดขวาง, การเคลื่อนที่อัตโนมัติ, การจำลองการเคลื่อนไหวของแขนหุ่นยนต์, การนำทางแบบใช้หุ่นยนต์หลายตัว และตัวหุ่นยนต์จะมาพร้อมเนื้อหาสำหรับเรียนรู้ร่วมกับระบบปฏิบัติการ ROS ในรูปแบบวิดีโอการสอนมากมาย ซึ่งช่วยให้ผู้เริ่มต้นเรียนรู้และใช้งานทั่วไป สามารถเรียนรู้ตัวหุ่นยนต์อย่างเป็นขั้นตอนและง่ายยิ่งขึ้น

การควบคุมตัวหุ่นยนต์ ROS Transbot
คุณสมบัติหุ่นยนต์ Yahboom ROS Transbot Robot
- การออกแบบและการบริการที่เป็นกันเอง : ตัวหุ่นยนต์จะการประกอบสำเร็จก่อนการจัดส่งพร้อมการ์ด TF กับไฟล์ระบบเฉพาะสำหรับตัวหุ่นยนต์ Transbot ยกเว้นในส่วนของบอร์ดควบคุม Jetson NANO 4GB ต้องประกอบเพิ่มเติมและกล้องจับภาพ ซึ่งช่วยให้ผู้เรียนสามารถเริ่มใช้งานหุ่นยนต์ได้อย่างรวดเร็ว (หมายเหตุ ตัวหุ่นยนต์จะมีบริการให้คำแนะนำทางด้านเทคนิคและบริการหลังการขายอื่นๆ)
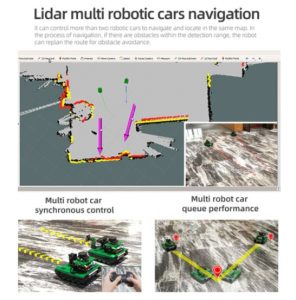
- อุปกรณ์ใช้ร่วมกับหุ่นยนต์ที่มีเสถียรภาพช่วยให้ใช้ฟังก์ชั่นได้ครบถ้วน : การใช้อุปกรณ์ลิดาร์ (Lidar) เป็นหลัก สำหรับหลีกเลี่ยงอุปสรรคและสิ่งกีดขวาง, การติดตาม, การนำทางด้วยแผนที่ 2 มิติ และการนำทางด้วยหุ่นยนต์แบบหลายตัว เป็นต้น การใช้กล้อง 3 มิติที่มีระยะลึกของภาพ สำหรับทำแผนที่ 3 มิติ, การประมวลผลภาพบนคลาวด์แบบจุด, การติดตามด้วยภาพเป้าหมาย KCF รวมถึงการใช้กล้องความคมชัดสูงระดับ HD เพื่อปรับความสว่างและการเคลื่อนที่ตัวหุ่นยนต์ 2 DOF ที่ยืดหยุ่น
ตัวย่างเนื้อหาสำหรับการเรียนรู้หุ่นยนต์ ROS Transbot
3. ใช้ระบบปฏิบัติการ ROS : ที่เป็นพื้นฐานหลักของการเรียนรู้ตัวหุ่นยนต์ รวมทั้งโปรแกรมสนับสนุนต่างๆ เพิ่มเติม เช่น Rviz, Movelt และ Qt รวมถึงการควบคุมการจำลองตัวหุ่นยนต์ด้วยโปรแกรม Movelt ในรูปแบบการควบคุมเครื่องจักรจริง

อุปกรณ์ในชุดทดลองหุ่นยนต์ ROS Transbot
- การควบคุมและการเชื่อมต่อข้ามแพลตฟอร์ม : ตัวหุ่นยนต์รองรับการควบคุมได้หลายรูปแบบ เช่น แอพพลิเคชั่น AI-enabled, การควบคุมระยะไกลด้วยภาพจริงในแบบ FPV, การเขียนโปรแกรมแบบออนไลน์ด้วย Jupyter Lab และการเขียนโปรแกรมควบคุมบนระบบปฏิบัติ ROS ให้กับตัวหุ่นยนต์

5. เนื้อหาและสื่อการเรียนรู้ด้วยวิดีโอ : ทั้งในส่วนของการแนะนำเบื้องต้นและการใช้งานต่างๆ รวม 64 ชั่วโมง พร้อมทั้งเอกสารโดยละเอียด ทำให้สามารถเรียนรู้ได้ตั้งแต่ผู้เริ่มต้นและผู้ที่มีประสบการณ์ โดยสามารถใช้หุ่นยนต์ ROS Transbot สำหรับเรียนรู้ได้อย่างต่อเนื่อง